First off, in an attempt to avoid litigation, I'd just like to say that our Beetleweight "Martha Stewart" is not related in any way, shape, or form to the human known as Martha Stewart, nor should any connection be inferred or implied by the name. (I hope that worked...)
Martha is a Beetleweight (limited to 3lbs of weight or less) fighting robot, designed and built by some friends and myself. Martha is radio-controlled, and will do combat in local MURC events. She is an invertable lifter/rammer/thwack/wedge bot. I think that covers most of the bases. ;)
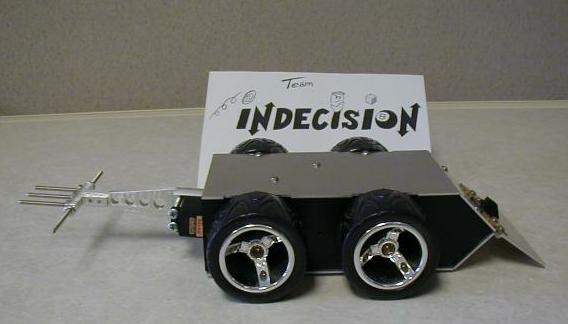
Basically, a new MURC event was announced to happen near my area, and I knew I lacked the time and motivation to finish Spat all by myself. So, I recruited the help of some friends at work, and together we formed Team Indecision. An appropriate name, because most major decisions invariably led to flipping a coin because voting was either deadlocked or lacked participation. In fact, we didn't arrive at the name Team Indecision until after flipping a coin to select one of two completely different names.)
Team Indecision are (in alphabetical order):
Mike Carlson - Radio, servo, design, team logo, general funding when needed.
Darren Hain - Design, support.
Scott Hammerschmidt - Design & fabrication of "the arm", as well as the supporting pivot mount.
Steve Myers - Design, support, pit crew.
David Smith - Design, drivetrain, speed controller, chassis fabrication.
The result of our labor (after much research, discussion, thinking, shrugging, hemming and hawing, general chin-scratching and occasional coin-flipping) is our Beetleweight, "Martha Stewart".
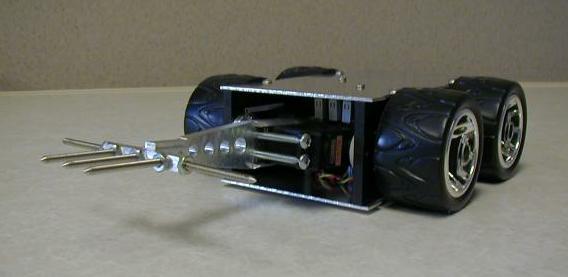
The drivetrain was taken from a cheapie Radio Shack R/C toy. Martha's aluminum lifting/ramming/thwack arm is powered by a Hitec HS-5645MG digital servo. She sports Larry Barello's ANT 100 speed controller, and is powered from 6 AA batteries. Her radio is a Hitec Laser4 75MHz FM transmitter, and the Hitec dual conversion receiver that came with the transmitter (with a Novak XXTRA receiver as a backup).
July 19, 2003 -- The Great Plains Robot Showdown 2003 - Martha's debut!
Fight 1 - video (Windows Media format, ~5.2MB): Martha went up against "Hornet", a very solid-looking pushybot with a scary-looking end mill on the front. Fortunately for Martha, Hornet had lots of nice places for her to grab onto with her spikes, so with some lifting and shoving, Martha won her first match by judges decision. Hornet put a couple scratches on her underside, but all we really needed to do was swap in some fresh batteries and she was ready for her next brawl.
Fight 2 - video (Windows Media format, ~5.2MB): Martha duked it out with multibot "Hit and Run 2". "Hit" is a 2lb bot with a large and menacing horizontal sawblade mounted low to the ground. "Run" is former Antweight "Shenanigans". Fortunately for Martha, "Hit" was having some radio problems, so she was able to grapple without too much risk. Hit's blade did work intermittantly, though, so Martha had to do some fancy dancing once in awhile. Hit got a couple of good bites on Martha, but she was able to grab on to Hit and force him to bite Run (which we thought was quite entertaining). Another judges decision for Martha--she was on a roll! We had to pound out her back flap and take care of a chewed up corner and swap on a fresh wheel, but Martha was still hanging in like a champ.
Fight 3 - video (Windows Media format, ~5.2MB): Martha's opponent for this round was the undefeated "Little Bite Of Death" (a.k.a LBOD). LBOD has a pneumatic flipper arm up front, and managed to tip Martha up on her side straight away. Fortunately, Martha can upright herself quite easily with a full throttle and some spinning. Something broke on LBOD's arm, so the rest of the fight was pretty much a shoving match. Martha was able to grapple LBOD a couple times, but she couldn't match his traction/power. Since he could push her around the arena, LBOD got the judges decision. Martha's first loss. No damage, so we swapped in some fresh batteries and were ready to go again.
Fight 4 - video (Windows Media format, ~5.2MB): Martha's last chance to stay in the tournament meant trying to defeat "Mildly Infectious". This bot has a nice, large wheelbase, a big hinged wedge up front, two long spikes in back, is low to the ground, and has a really bright blue LED in back. We lined Martha up backwards in the hope of running over the top of "Mildly Infectious" and then immediately attacking from the rear by lifting him up by his spikes. Much to our surprise, the two bots met up with a crash and both came to a stop. "Mildly Infectious" was momentarily propped up by his wedge flap, but a quick jump in reverse had him straightened out again. Martha danced as best she could, but "Mildly Infectious" had the better driver. Martha couldn't grapple him effectively, and she had a hard time getting off "Mildly Infectious" once he scooped her up with his big wedge. Therefore, another judges decision against Martha, and she was out of the tournament.
Beetleweight Rumble: A rumble is when they put as many bots as possible of the same weight class in the arena at the same time and let 'em go at it as a free-for-all melee. This was great fun! I don't remember many details (other than being really impressed with "Prowler"s speed), but when the 3 minutes were up, Martha was one of the few 3 or 4 bots still in good working condition (though her spikes were pretty bent up).
In the end, Martha wound up in 5th/6th position with "Prowler". On the way home, we discussed Martha's weaknesses and came up with the following solutions/upgrades:
I think we're going to try out these upgrades and see just how much improvement they make. It sounds like most of the guys are ready to retire Martha and move on to a new design, but I think she's got some fighting left in her. There are some bots out there that would still outmatch her even with these upgrades, but I think it'd be fun to try anyway...
July 17, 2003 -- Martha is more or less complete. (A build journal would've been pretty neat, but I obviously didn't think of it before now. Sorry.)
We discovered a minor issue with the pivot point of her arm during testing today, but Scott should get some bearings pressed in tonight and she'll be right as rain again. I bought a whole bunch of batteries tonight (hope that didn't raise a red flag somewhere), and we're all pretty excited to compete in GPRS '03 this Saturday!
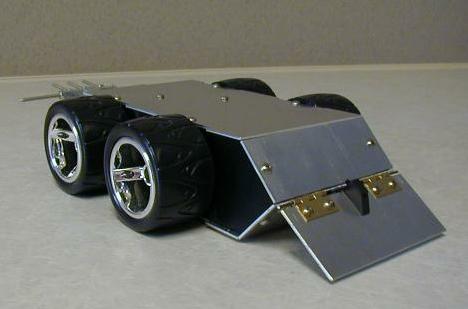
Here are some pictures!


![]()
![]()

![]()
![]()
![]()
